

Husarion wprowadza na rynek dwa gotowe zestawy dla entuzjastów robotyki, którzy poszukują edukacyjnych platform przeznaczonych do nauki programowania. Roboty są gotowe do pracy od razu po wyjęciu z pudełka. Idealnie nadają się dla osób, które chcą się skupić na nauce i tworzeniu oprogramowania, bez wgłębiana się w skomplikowaną mechanikę.
Robot do telekonferencji współpracuje z większością smartfonów oraz tabletów z Androidem, a łazik ROSbot wyposażony jest we wszystkie niezbędne do autonomicznego działania serwomotory, kamerę i skaner laserowy RPLIDAR A2.
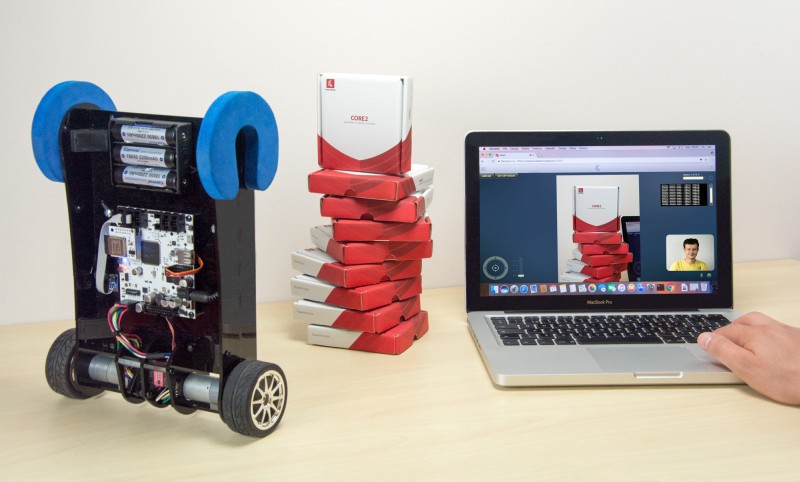
Robot do telekonferencji CORE2 – gotowy do pracy w zaledwie 5 minut
Robot telekonferencyjny to platforma dedykowana studentom i hobbistom, którzy zaczynają swoją przygodę z programowaniem robotów. Urządzenie składa się z kontrolera Husarion CORE2 oraz jednoosiowej platformy nośnej stabilizowanej żyrokompasem z mocowaniem dla mobilnego urządzenia z Androidem. Robot wykorzystuje przednią kamerę smartfonu lub tabletu, dając użytkownikowi możliwość badania otoczenia, prowadzenia wideorozmów przez aplikację hVideo oraz zdalnego nadzorowania pomieszczeń.
Pojazd może być sterowany zdalnie poprzez przeglądarkę. Kontroler CORE2 zainstalowany na pokładzie urządzenia umożliwia jego dalszą rozbudowę, a wykorzystany tu kod źródłowy jest w pełni otwarty, co pozwala na dowolną jego modyfikację. Oprogramowanie robota może być aktualizowane i zmieniane dzięki bezprzewodowemu dostępowi do chmury Husarion.
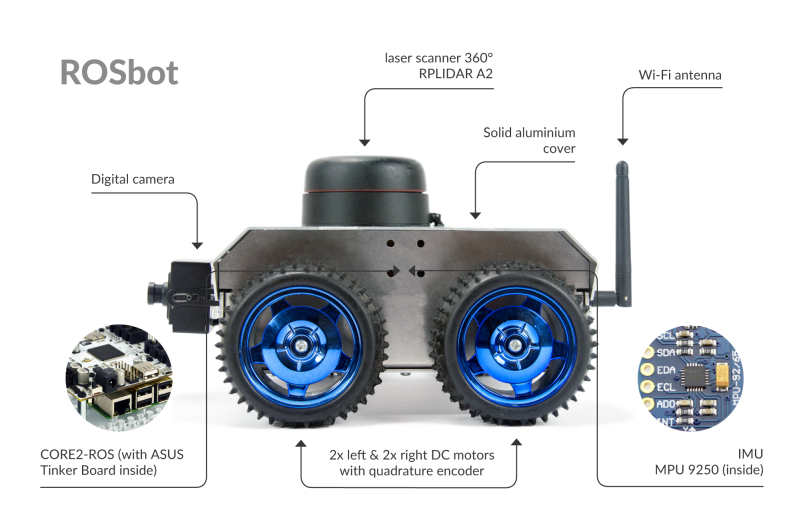
ROSbot – autonomiczny łazik ze skanerem laserowym
Mobilne i autonomiczne roboty są dziś jedną z dynamicznie rozwijających się branży robotyki. Jednak poziom komplikacji dostępnych na rynku platform oraz bardzo często konieczność budowy robotów element po elemencie, stanowią poważną barierę w ich popularyzacji.
Stworzony przez firmę Husarion łazik ROSbot bazuje na kontrolerze CORE2-ROS połączonym z wydajnym modułem ASUS Tinker Board. Jego atutem jest dostępność w formie gotowego zestawu, który użytkownik może uruchomić bezpośrednio po wyjęciu z pudełka. Wykorzystuje on oprogramowanie firmy Husarion oparte na systemie ROS (Robot Operating System), które dzięki licencji open-source każdy użytkownik może dowolnie modyfikować. Łazik wyposażony jest w kamerę oraz skaner laserowy. Może być zdalnie zarządzany oraz programowany przez interfejs webowy połączony z chmurą Husarion.
Husarion udostępnia użytkownikom ROSbota darmowe poradniki dla systemu ROS, dzięki czemu łazik może być szeroko wykorzystywany przez szkoły i uczelnie do nauki robotyki. Może też stanowić podstawę komercyjnych robotów autonomicznych – inspekcyjnych, usługowych czy działających w tzw. rojach.
Programowanie obu napędzanych kontrolerem CORE2 robotów jest wyjątkowo proste i przypomina tworzenie stron internetowych. Przeglądarkowy interfejs chmury Husarion jest przejrzysty i pozwala na edycję kodu źródłowego bez instalowania dodatkowego oprogramowania. Intuicyjne biblioteki open source hFramework (dostępne pod adresem https://github.com/husarion) sprawiają, że do pracy z robotami wystarczy podstawowa wiedza programistyczna. CORE2 jest również kompatybilny z szeroko dostępnymi bibliotekami Arduino, a ich wykorzystanie w robotach firmy Husarion nie wymaga absolutnie żadnych modyfikacji.
Cena i dostępność:
Zestawy edukacyjne Husarion kosztują odpowiednio:
- Robot do telekonferencji – 249 dolarów (ok. 899 złotych)
- ROSbot – 1290 USD (ok. 4699 złotych)
Produkty można zamawiać online za pośrednictwem platformy Crowd Supply: https://www.crowdsupply.com/husarion/core2
Specyfikacja:
| Model | Robot do telekonferencji (Husarion CORE2) |
| Mikrokontroler
(Husarion CORE2) |
STM32F407
Procesor: ARM Cortex-M4 @168 MHz Pamięć RAM: 192 KB Pamięć flash: 1 MB |
| Moduły robota | 2x silniki prądu stałego z enkoderami
wysuwany stojak 3-osiowy żyrokompas z akcelerometrem: MPU-9250 |
| Źródło zasilania | Bateria litowo-jonowa 11,1V |
| Komunikacja bezprzewodowa | Wi-Fi, Bluetooth 4.0 (ESP32) |
| Wyjścia/wejścia serwomechanizmów | 6 (5)* |
| Wyjścia silników prądu stałego | 4 (2)* |
| Interfejsy enkoderów | 4 (2)* |
| GPIO | 42 (37)* |
| UART | 4 |
| SPI | 1 |
| I2C | 3 (2)* |
| CAN | 1 |
| Wejścia zewnętrznego ADC | 13 (12)* |
| Wejścia zewnętrznych przerwań | 8 (7)* |
| Wymagania | Smartfon lub tablet z systemem Android 4.1 (lub nowszym) oraz aplikacja hVideo (dostępna w sklepie Google Play)
Maksymalne wymiary instalowanego urządzenia: szerokość do 135 mm, wysokość do 200 mm |
* – niewykorzystane interfejsy w nawiasach
| Model | ROSbot (Husarion CORE2-ROS) |
| Mikrokontroler
(Husarion CORE2-ROS) |
STM32F407
Procesor: ARM Cortex-M4 @168 MHz Pamięć RAM: 192 KB Pamięć flash: 1 MB |
| Komputer jednopłytkowy
(Husarion CORE2-ROS) |
ASUS Tinker Board Procesor: Cortex-A17 Quad-core 1.8GHzProcesor graficzny: ARM Mali-T764 Pamięć RAM: 2GB Pamięć flash: 16 GB (microSD) |
| Interfejsy kontrolera czasu rzeczywistego (tylny panel) | 16x GPIO,
2x UART, SPI, I2C, 8x ADC, 3x zewn. przerwań, 6x we/wy serwomech,, USB, port szeregowy |
| Interfejsy komputera jednopłytkowego | 2x USB, HDMI |
| Komunikacja bezprzewodowa | Wi-Fi, Bluetooth 4.0 |
| Moduły robota | LiDAR: 360° RPLIDAR A2
4x czujniki zbliżeniowe pracujące w podczerwieni 3-osiowy żyrokompas z akcelerometrem: MPU-9250 4x silniki prądu stałego z enkoderami |
| Źródło zasilania | Bateria litowo-jonowa 11,1V, ładowarka w zestawie |